Dependiendo del controlador o controladores del sistema domótico podemos distinguir tres clases de arquitectura:
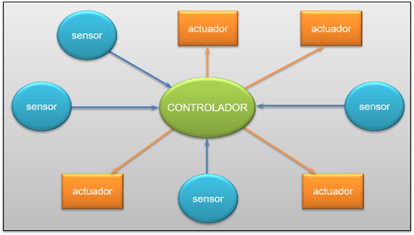
Arquitectura centralizada
Todos los sensores y actuadores se cablean hasta el único elemento de control. Un controlador central recibe información de los múltiples sensores y, una vez procesada, genera las órdenes oportunas para los actuadores. Como desventajas de este sistema podemos mencionar el mayor cableado y coste, y el depender de un único controlador. Tiene las ventajas de su sencillez y de tener centralizados los módulos de E/S y de control.
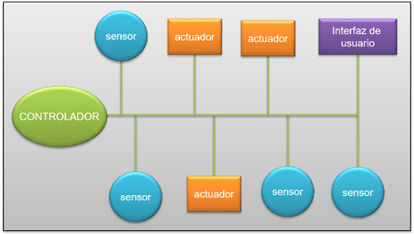
Arquitectura descentralizada
Los sensores y actuadores están conectados en red con un controlador central. Tiene menos cableado, pero se mantiene el inconveniente de la dependencia de un único controlador.
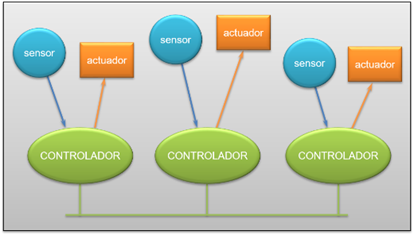
Arquitectura distribuida
Hay diversos controladores locales conectados en bus local entre sí. Con esta arquitectura no existe la figura del controlador centralizado, sino que toda la inteligencia del sistema está distribuida por todos los nodos, programándose independientemente cada elemento del sistema. La ventaja más importante de un sistema distribuido es el hecho de que en caso de un problema con uno de los dispositivos, solo ese dispositivo se ve afectado y no necesariamente el resto de la instalación. Son sistemas con menos cableado, con funcionamiento más seguro y de fácil instalación y ampliación. Como inconveniente podemos mencionar la necesidad de programación de cada controlador, aunque puede ser programación remota y centralizada.