Los actuadores operan de forma inversa a los sensores, en el sentido de que reciben una información de entrada sustentada en alguna magnitud física, y en función de ella generan valores de una magnitud física con suficiente energía como para realizar una acción, por lo general mecánica. Por ejemplo. cuando mi móvil recibe una señal de que se está produciendo una llamada entrante, un actuador de su interior generan una vibración mecánica. Si se tiene activado el sonido, también entrará en función el altavoz, que es un actuador electro-acústico. En efecto, la señal eléctrica que percibe un altavoz con la información del sonido la transforma, a través de una membrana que vibra, en variaciones en la presión del aire que al llegar a la membrana del tímpano son audibles por las personas próximas al altavoz; es decir, funcionan como transductores.
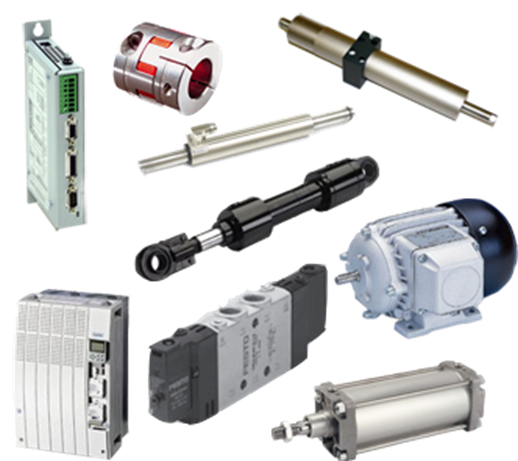
En Automática el concepto de actuador se refiere tan sólo a dispositivos en los que la energía de una determinada fuente (que puede ser energía asociada a aire comprimido, presión de un líquido o electricidad) la convierte en energía mecánica (movimientos lineales o circulares o vibratorio) (Figura 5).
Hay que hacer notar que los actuadores tienen asociado, al igual que los sensores, un proceso de transducción; en este caso las señales en forma de energía eléctrica se transforman a otra forma de energía (mecánica, óptica, etc.).
Entre los actuadores más usados se encuentran los relés y los motores eléctricos.
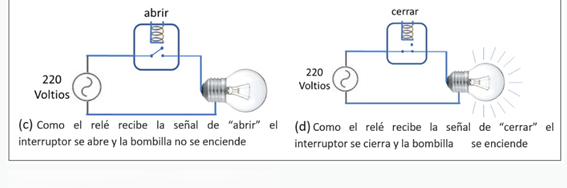
Un relé es un dispositivo electromecánico que con una pequeña señal eléctrica es capaz de desplazar un contacto mecánico, conectando o desconectando el suministro de electricidad a cualquier sistema eléctrico: un motor, un tostador, un calefactor, un sistema de climatización, etc. En una posición del relé se cierra el circuito eléctrico y en la otra se abre. (Figura 6).
Los motores eléctricos convencionales transforman la energía de una corriente eléctrica en el movimiento circular continuo y uniforme de un eje mecánico. En IoT (y automática, en general) se utilizan también otros tipos de motores, como los siguientes:
- Motores angulares o de giro, el motor gira tan sólo un determinado ángulo (entre 0 y 360 grados) dependiendo de la señal eléctrica de entrada.
- Motores de pasos (Stepper) dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientos angulares discretos, lo que significa que es capaz de girar una cantidad de grados dependiendo de sus entradas de control. Es un tipo de motor angular.
- Motores lineales. En vez de originar un desplazamiento circular se realiza linealmente entre varios puntos.
Estos tipos de motores se denominan servomotores debido a que se puede controlar con gran precisión el ángulo, velocidad y aceleración del giro.
La aplicación de los servomotores es muy amplia. Con ellos, por ejemplo, se pueden construir electroválvulas que se emplean para regular el caudal de gases y líquidos.
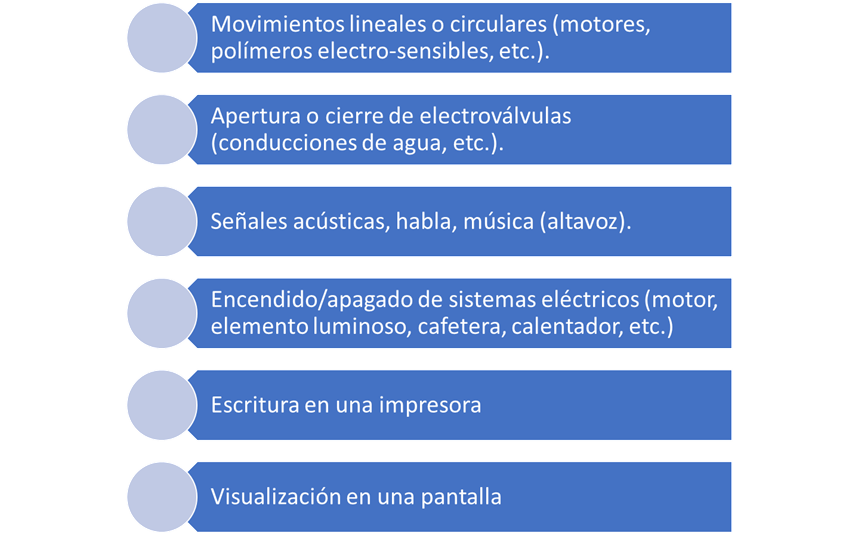
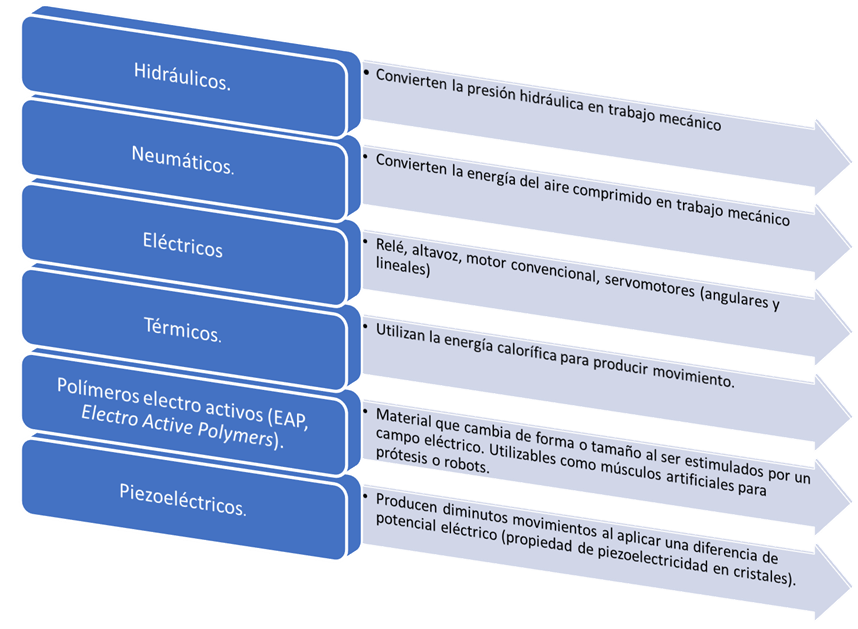
En las figuras 7 y 8 se enumeran distintos tipos de actuadores y acciones que producen, respectivamente.
Hay otros dispositivos de salida que no requieren una acción mecánica como por ejemplo una pantalla de ordenador; que es un transductor fotoeléctrico ya que transforma la corriente eléctrica en energía luminosa por medio de una matriz de celdillas luminosas (píxeles) independientes.